国家重点高新技术企业
企业电话:4008-29-4008
市场热线:135 1000 7015
企业邮箱:yuzhi@cieszs.com
公司地址:深圳市坪山区坑梓街道人民中路震雄工业园B区7-B栋

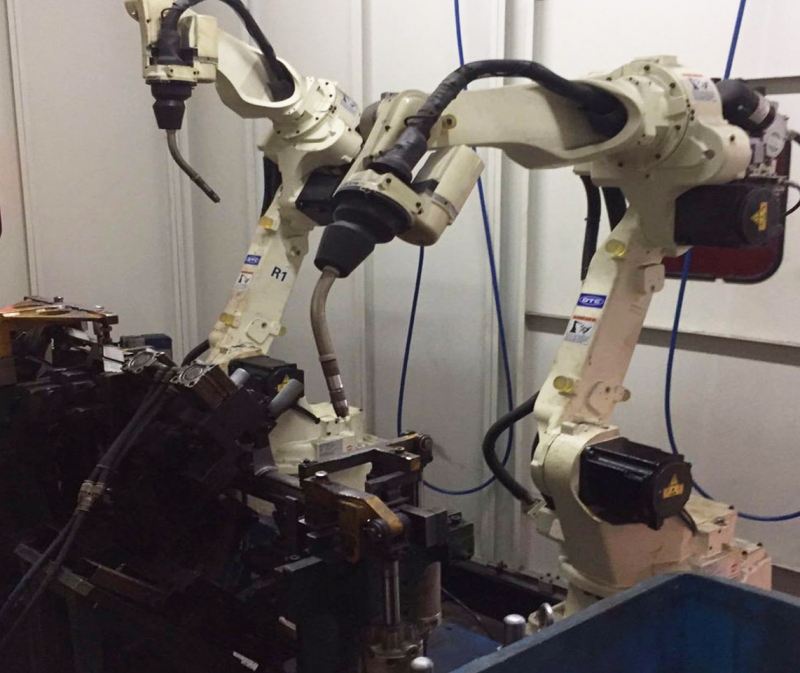
由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定.文中针对狭窄空间特点,开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把机器人机构分为轮式移动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪,焊炬调节机构负责焊缝精准跟踪,电弧传感器完成焊缝偏差实时识别.另外,机器人控制器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构,提高其系统可靠性 。


全面的智能制造和装备 满足客户定制化需求
 深圳市坪山区坑梓街道人民中路震雄工业园B区7-B栋
深圳市坪山区坑梓街道人民中路震雄工业园B区7-B栋
 yuzhi@cieszs.com
yuzhi@cieszs.com